Il problema della “regolazione” dell'uscita è forse quello storicamente più famoso nel contesto dei sistemi di controllo industriali. Tale problema è caratterizzato dal fatto che una grandezza fisica y(t) (chiamata “uscita” del processo fisico) deve idealmente evolvere secondo una predefinita funzione del tempo r(t) (chiamata “riferimento”). L'errore di regolazione e(t)=r(t)-y(t) (detto per semplicità “errore”) è per l'appunto la differenza tra il riferimento e l'uscita. Il problema della regolazione corrisponde a riuscire a manipolare il processo fisico (scegliendo opportunamente i suoi “ingressi” u(t) in base alle equazioni matematiche del “controllore”) in modo da portare tale errore a zero. Alcuni esempi corrispondono al climatizzatore di un'automobile, dove l'uscita è la temperatura dell'abitacolo, il riferimento è la temperatura impostata dall'utente, e gli ingressi sono la velocità della ventola e la percentuale di aria calda/fredda. Sistemi più sofisticati spaziano dal controllo di assetto di aerei, droni o satelliti in ambito aerospaziale, controllo di anestesia o glicemia in ambito biomedico, controllo di robot e processi industriali in ambito manifatturiero, e molti altri.
Uno dei metodi o sistemi di controllo più diffusi in ambito industriale è il controllo PI, nel quale viene combinata un'azione proporzionale (P) all'errore e una proporzionale all'integrale (I) dell'errore:  . In effetti l'azione integrale è molto utile perché consente di ottenere la convergenza a zero dell'errore, in quanto non esiste una condizione di stazionarietà a meno che non ci sia tale convergenza. Il lavoro di ricerca svolto in collaborazione con vari esponenti internazionali della teoria del controllo non-lineare corrisponde all'inserimento di un'opportuna logica di reset nell'equazione differenziale (ovvero integrale) che governa l'evoluzione della grandezza interna al sistema di controllo. L'inserimento dei reset, fa si che l'evoluzione della variabile non sia continua e dunque non descrivibile da un'equazione differenziale, ma richieda tecniche “ibride” che prevedono un mix di evoluzione continua e discreta (la soluzione di un'equazione differenziale è per definizione una funzione continua del tempo).
. In effetti l'azione integrale è molto utile perché consente di ottenere la convergenza a zero dell'errore, in quanto non esiste una condizione di stazionarietà a meno che non ci sia tale convergenza. Il lavoro di ricerca svolto in collaborazione con vari esponenti internazionali della teoria del controllo non-lineare corrisponde all'inserimento di un'opportuna logica di reset nell'equazione differenziale (ovvero integrale) che governa l'evoluzione della grandezza interna al sistema di controllo. L'inserimento dei reset, fa si che l'evoluzione della variabile non sia continua e dunque non descrivibile da un'equazione differenziale, ma richieda tecniche “ibride” che prevedono un mix di evoluzione continua e discreta (la soluzione di un'equazione differenziale è per definizione una funzione continua del tempo).
Nel 2004, durante una visita presso la University of Melbourne (Australia), insieme con Andy Teel (USCB, USA) e Dragan Nesic (University of Melbourne, Australia) abbiamo affrontato il problema dell'analisi di stabilità e prestazioni di sistemi di controllo con reset con una nuova teoria di Lyapunov per sistemi dinamici ibridi ancora in fase di sviluppo (una monografia che ne descrive le caratteristiche principali è stata pubblicata nel 2012). Tale teoria ha finalmente permesso di fornire un quadro completo per comprendere, e dimostrare matematicamente, i vantaggi dei “reset controllers”. La Figura 1 rappresenta una delle “funzioni di Lyapunov” associate alla dimostrazione di stabilità per un sistema controllato da un integratore di Clegg.
Da allora, le applicazioni dei sistemi di controllo con reset stanno aumentando e lo sviluppo di algoritmi di controllo generici per la loro sintesi è oggetto di attività intensa di ricerca, in collaborazione con vari centri internazionali (UCSB, University of Melbourne, LAAS-CNRS Toulouse). Recentemente, nell'ambito di una collaborazione con Dana Rexroth Transmission Systems (Arco, TN) il reset control è stato adattato al controllo di corrente (uscita) che fluisce in una elettrovalvola, usando la tensione applicata (ingresso). La Figura 2 mostra un esempio di regolazione con un riferimento non costante su un orizzonte di 300 secondi. Il controllore ha una struttura adattativa e la figura mostra come l'adattamento (grafico in basso) permetta di ottenere una perfetta sovrapposizione tra il riferimento (curva grigia) e l'uscita (curva blu).
Responsabile: prof. Luca Zaccarian
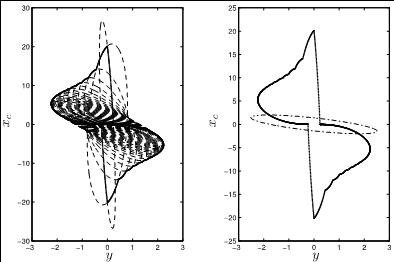 Figura 1
Figura 1
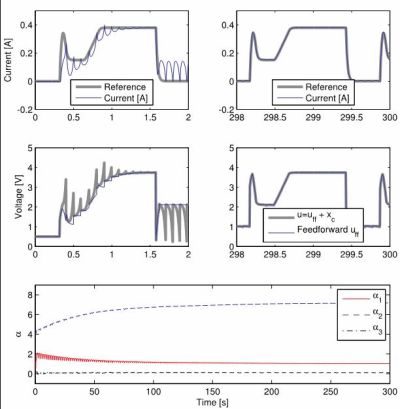 Figura 2
Figura 2